About the project
Authors
Rohan Shah, Josiah Engstrom, Nick Gravish
University of California, San Diego
2023
Poster
2023 GEAR Research Symposium
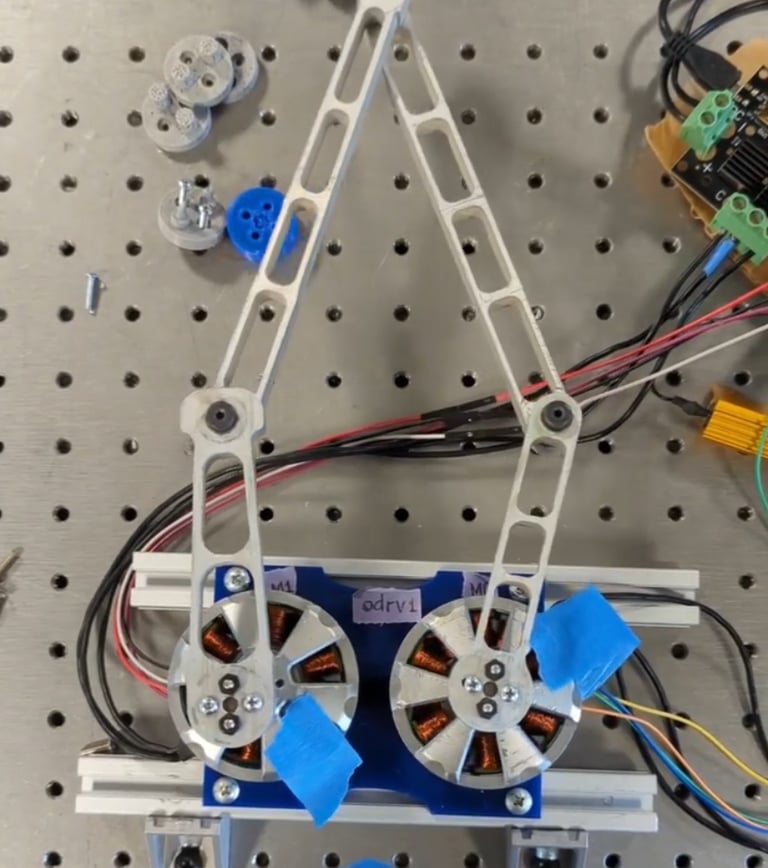
Modelled after the Stanford Doggo's limbs, my first research project was to develop cost-effective legs by removing the dependency on sensors.
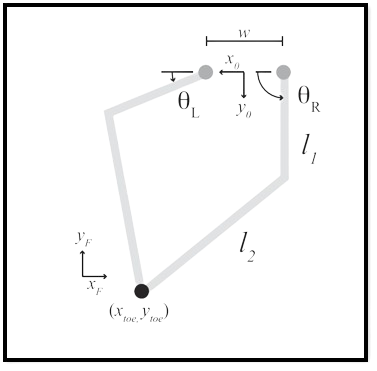
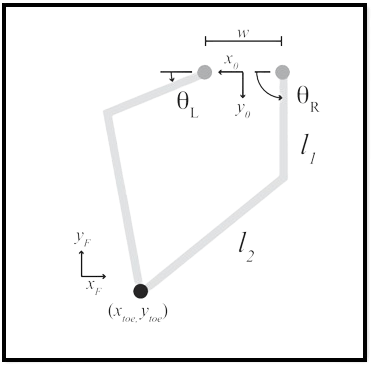
We achieved this by measuring the back EMF of the motors to detect when a collision was occurring. Then, we hit the obstacle at different angles to determine its exact location with respect to the "toe" of our limbs. We then stepped over the obstacle using inverse kinematics models of the five-bar linkage.