About the project
Authors
Rundong Yang, Ellen Liu, Ethan Wold, Simon Sponberg, Nick Gravish
University of California, San Diego and Georgia Institute of Technology
Conferences
SMASIS 2024
In conjunction with Georgia Tech's Agile Systems Lab, we sought to implement a hawkmoth's wing system on a micro robot, as it was observed that the hawkmoth's nervous system plays no role in the flapping of its wings. For this, we implemented a velocity based control system called the Delayed Stretch Actuation model.
Manufacturing
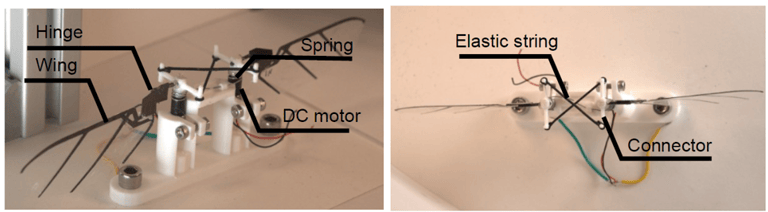
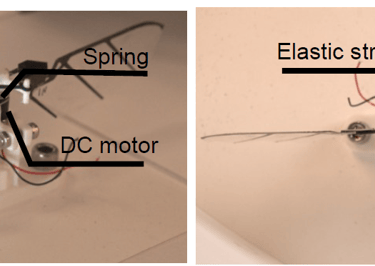
The carbon fiber wings are connected to the motor using a passive hinge and spring mechanism which allows movement only in the forward and backward direction. Then, we used an elastic string to synchronize the movements of the two wings using the coupling mechanism shown to the right.
Experiments
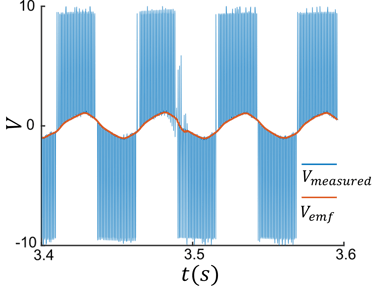
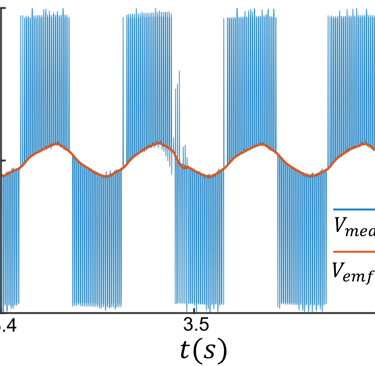
My role within this larger project was to analyze the back EMF measurements that we were planning to use in the control system. I did so using National Instruments PCIe-6323 DAQ and implementing a control system using Simulink. My findings are depicted to the right.
I was also responsible for conducting amplitude sweep tests for lower gear-ratio motors (i.e. low inertia regimes) with a wide range of parameters used in the DSA model. The heatmap for the same is shown below.
Mechanically Intelligent Wings
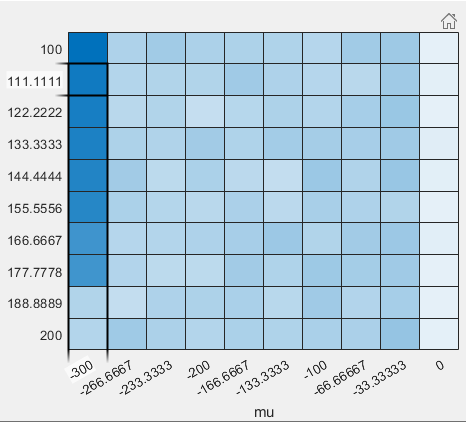
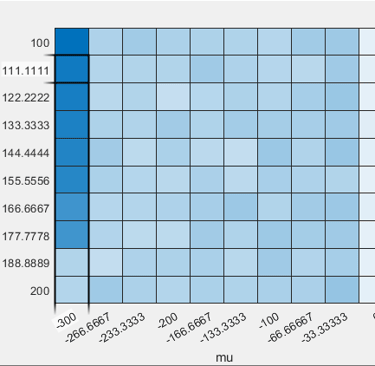
My findings were essential to understanding how the resonant frequency of the wings changes with change in inertia of the system. It also provided an insight into making flapping wing flight more energy efficient.