More projects
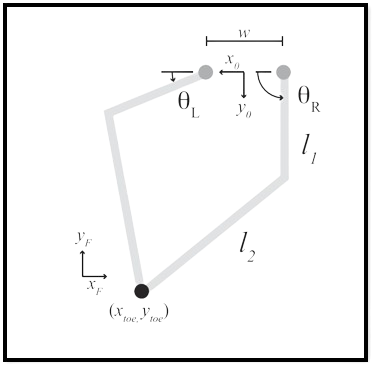
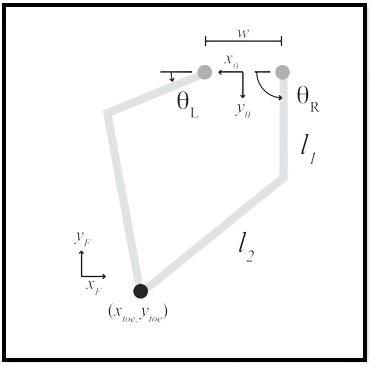
Sensorless Legged Locomotion
Modelled after the Stanford Doggo's limbs, my first research project was to develop cost-effective legs by removing the dependency on sensors.
We achieved this by measuring the back EMF of the motors to detect when a collision was occurring. Then, we hit the obstacle at different angles to determine its exact location with respect to the "toe" of our limbs. We then stepped over the obstacle using inverse kinematics models of the five-bar linkage.
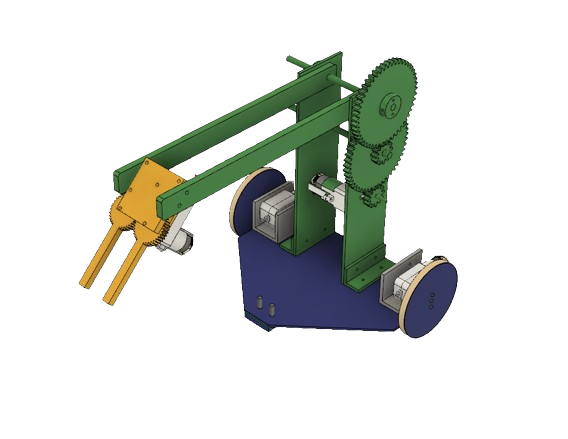
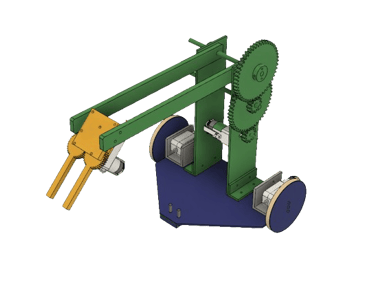
Rebit
In my second year, I led a three member team to develop a robot that was capable of handling objects that aren't easily accessible.
I was responsible for designing and fabricating the arms of the robot that could pick up heavy objects from afar while ensuring that the robot doesn't tip over. For this, I implemented a gear train capable of holding up the arms, the claw, and an object 2 times heavier than the robot.
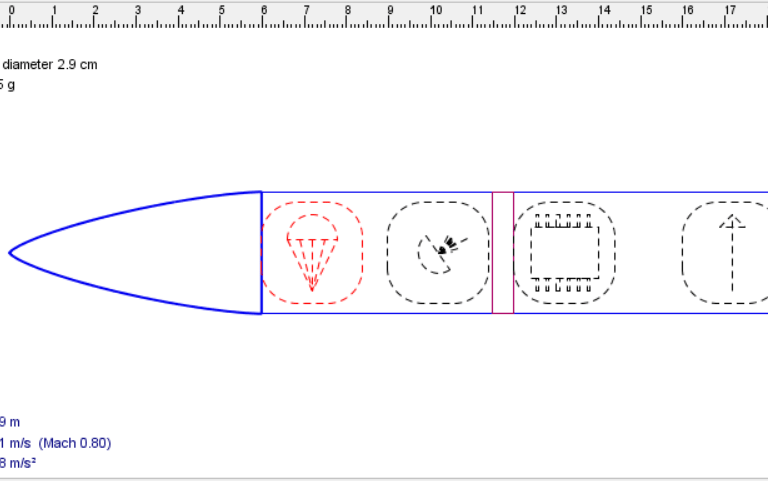
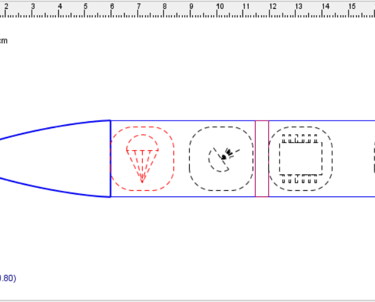
GoGo Rocket
Equipped with an avionics bay and a center deploy mechanism, GoGo Rocket was my first project at UC San Diego. As a freshman in the Rocket Propulsion Laboratory, I was in charge of setting up the circuitry to ensure safe return of our rocket that was capable of reaching an apogee of 1000 meters.
Over a span of 6 months we designed, fabricated and launched our rocket in the Mojave Desert. While we weren't able to safely retrieve the rocket, this project laid my foundation in engineering.