About the project
Authors
Rohan Shah, Nick Gravish
University of California, San Diego
2023
We observed that multi-legged insects and animals exhibit dynamics that are consistent with speed-dependent interaction forces when walking.
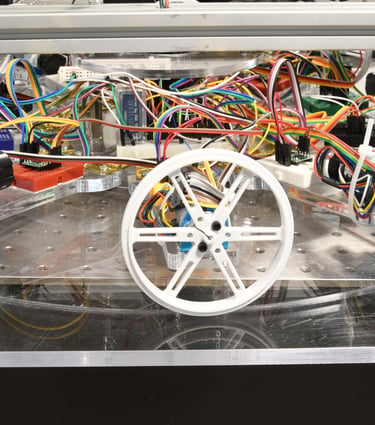
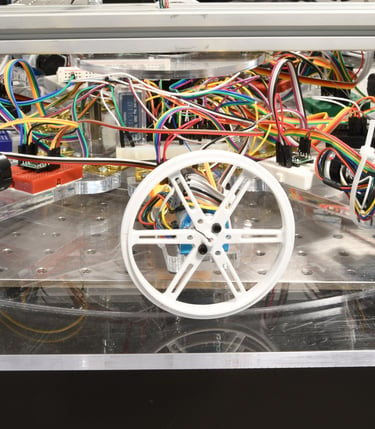
To study this phenomenon in further depth, we set up the Friction Carousel, where we modeled the legs of the organism as ten wheels wrapped around a central axis to ensure continuous motion. Through this system, we were able to create a controllable friction surface with active contacts.
Manufacturing
As the Primary Author, I was responsible for fabricating, maintaining, and automating the entire setup. For the base and ten arms, I laser cut acrylic pieces according to our design. These pieces were held together by a central square turntable which was the center of rotation for the system.
For the controls, I used two Teensy 4.1 MCUs with wired communication between them. Additionally, both these MCUs communicated wirelessly via Bluetooth with the primary computer. Each Teensy controlled five motors with encoders and the Master Teensy also received inputs from a Central Encoder.
Experiments
Our primary experiments revolved around velocity analysis, where we analyzed how the system velocity varied with varying wheel speeds. From these, we found that the system speed follows the median of wheel speeds.
Then, we moved on to velocity experiments in higher inertia regimes where we characterized the velocity curves of the system speeds and predicted the exponential fits as a function of the inertia and individual wheel speeds.
Later, we conducted force experiments where we sought to demonstrate that the frictional force applied by individual wheels was independent of their speeds.
Finally, we conducted torque experiments where we observed controllable force-velocity profiles and the existence of a "viscous" like force acting on the multi-contact system.
Friction Carousel
Conferences/Presentations
2024 APS March Meeting: https://meetings.aps.org/Meeting/MAR24/Session/F38.5
2023 GEAR Summer Research Event